Autonomous Fire Fighting Robot
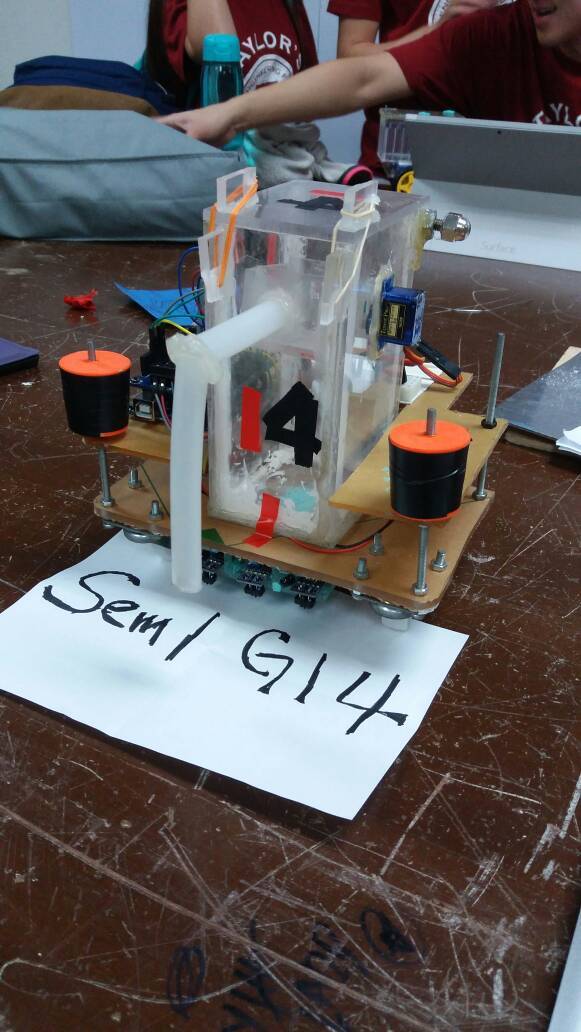
The aim for this project was to create an autonomous firefighting robot that was able to follow a set route and put out a flame at the end of the course. This project required the use and understand of an Arduino board. The robot was limited to a 20cm x 20cm x 20cm footprint. As such, the robot was designed to have two layers to house all the electronics required for the robot.
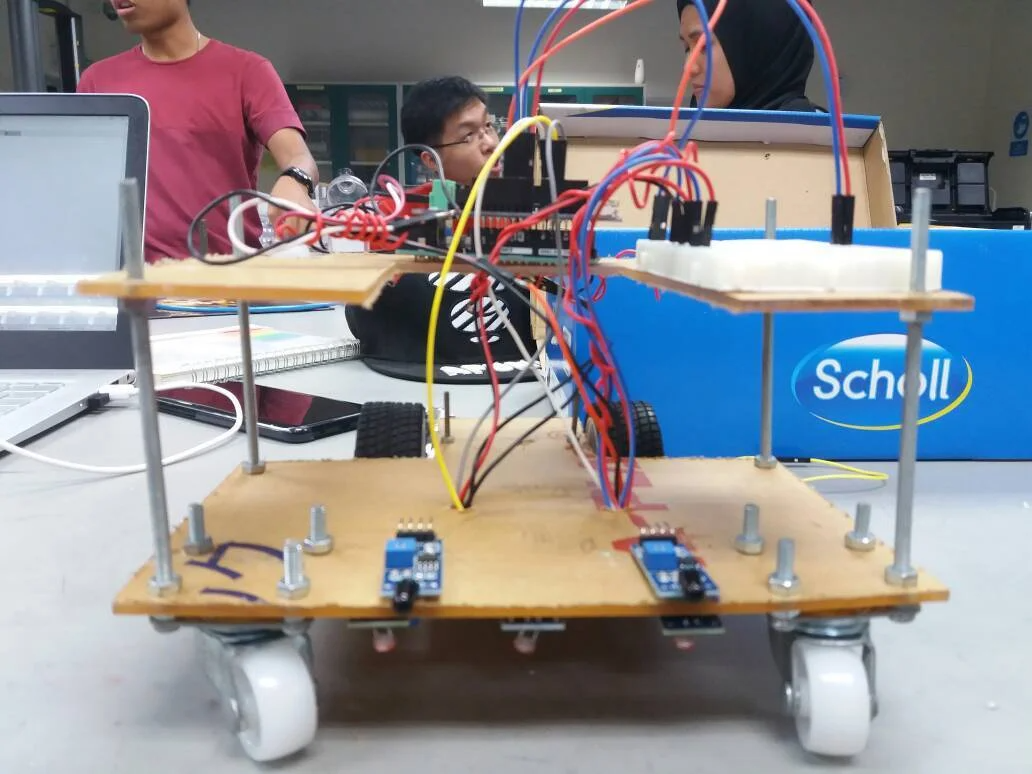
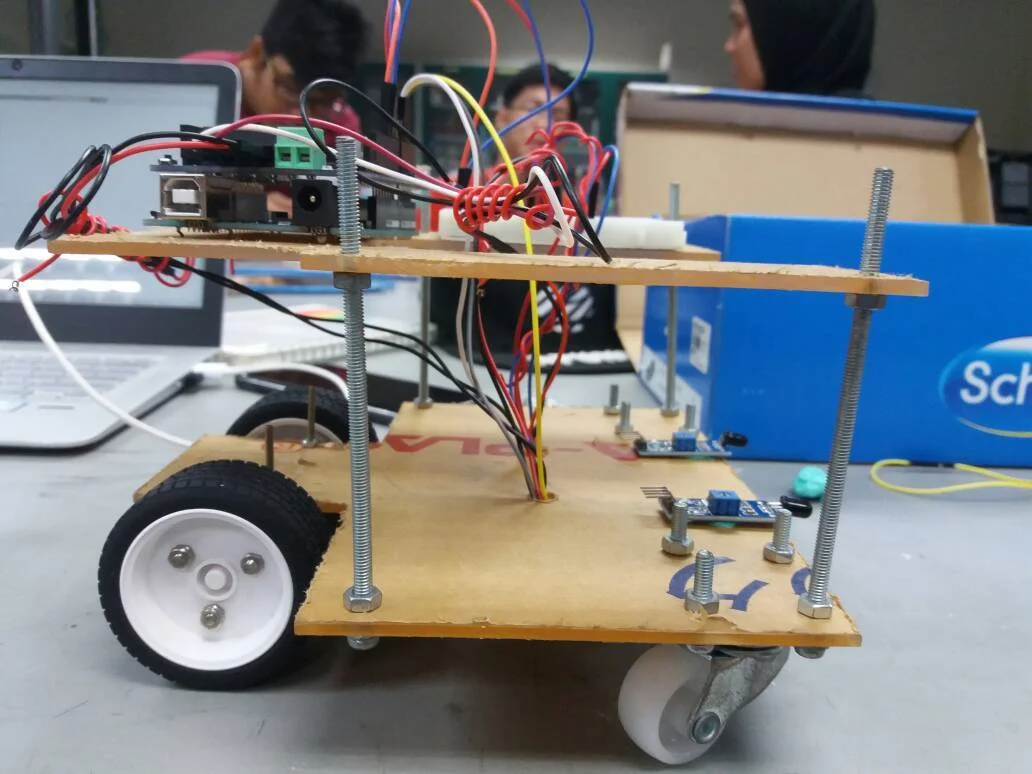
For this project, an Arduino UNO R3 board was used as the main processing unit of the robot. We have used three infrared sensors to allow for the robot to detect the route that it was running. Two DC motors were responsible for the movement of the robot. The DC motors are connected using a gearbox and the driveshafts drive the rear wheels. Two front castor wheels are used to ensure the stability of the robot while allowing for the robot to steer freely.
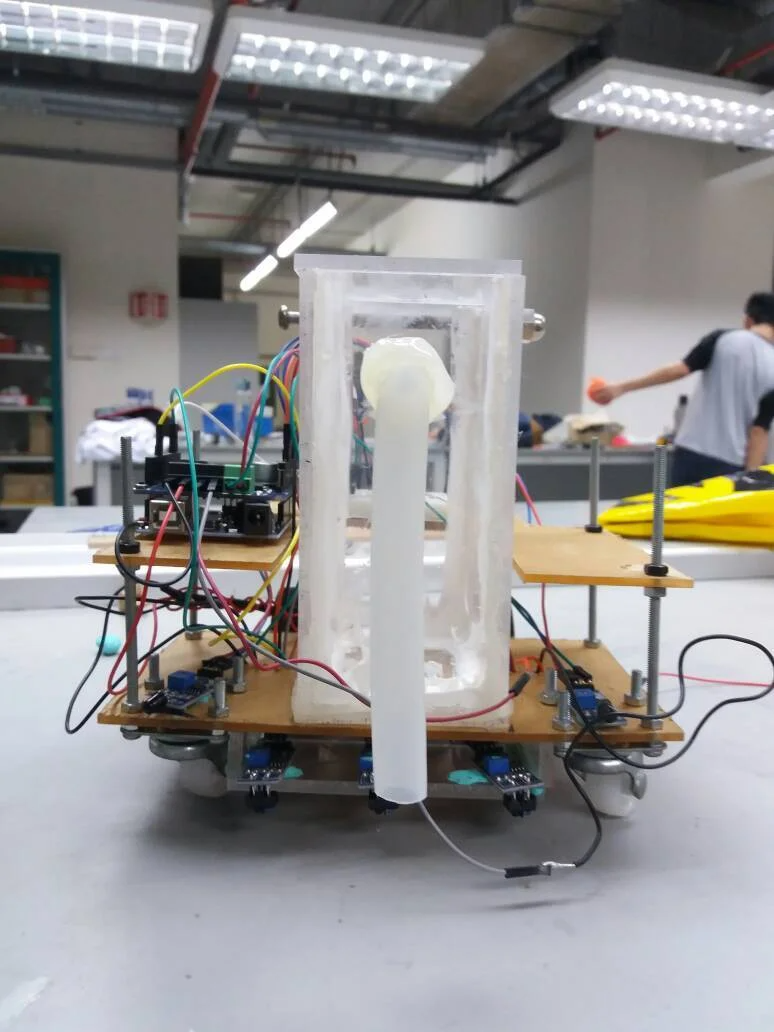
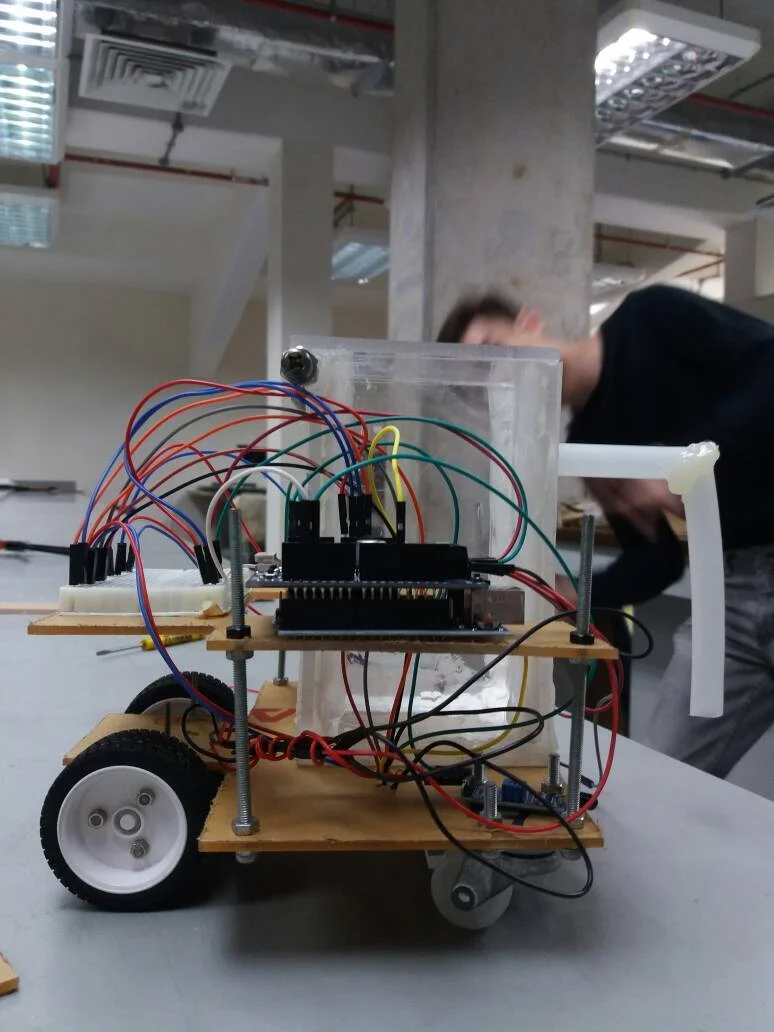
To extinguish the fire, a mixture of chemicals were the only means allowed. As such, hydrocloric acid and calcium carbonate were chosen as the chemicals to be used to produce carbon dioxide to extinguish the fire. A light sensor was placed at the front of the robot to detect the flame. This is used to trigger the mixing of chemicals to produced carbon dioxide. This is done to prevent carbon dioxide to be produced too early, affecting the ability of the robot to extinguish the flame. A servo motor is placed in the middle of the container, holding onto a cradle. The cradle contains the calcium carbonate that will be mixed into the hydrochloric acid to produce the carbon dioxide.
